 Инженерное ПО SIMOTION SCOUT
Инженерное ПО SIMOTION SCOUT Инжиниринговая система SCOUT позволяет решать все задачи Motion Control-, PLC- и технологического программирования в единой системе Motion Control SIMOTION и включает в себя все необходимые инструметы: от средств параметрирования и ввода в эксплуатацию приводов и программирования контроллера до инструментов отладки и диагностирования.
Модули управления SIMOTION D имеют базовые функции программирования в соответствии с IEC 61131 (Kernel).
С помощью дополнительных технологических пакетов базовая функциональностиможет расширяться такими функциями как, например, позиционирование, синхронное движение, нелинейные кулачки и дополнительные каналы регулирования температуры.
Эти технологические функции наглядно представляются в виде функциональных блоков, параметры которых можно адаптировать к конкретной задаче.
Существует множество готовых технологических блоков которые можно свободно комбинировать, изменять и параметрировать.
Дополнительно технологические блоки имеют программные интерфейсы, позволяющие легко инегрировать их в программу пользователя.
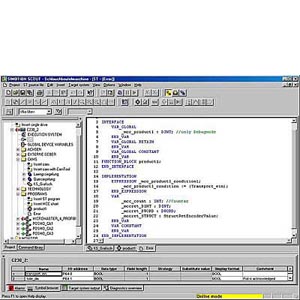
Язык программирования высокого уровня Структурированный текст (ST) предоставляет все языковые средства в форме ко-манд. Это позволяет создавать хорошо структурированные программы.Основные команды реализует всё, что требуется для: • управления данными,
• функций вычислений,
• структур управления,
• обработки периферийных устройств.
При использовании технологического пакета управления движением расширяется диапазон доступных команд засчёт дополнительных эффективных и очень гибких команд управления движением (например: команда _pos (...) ис-пользуется для позиционирования оси, регулируемой по положению).Исходный файл на языке ST в основном состоит из непрерывного текста. Этот текст может быть поделён и структури-рован по разделам, которые представляют логические секции исходного файла ST.
Эти разделы могут состоять из следующего:
• программы, назначенной к уровню исполнения реального времени,
• функционального блока с выделенной памятью
• функции без выделенной памяти.
Функциональные блоки и функции не назначаются уровню исполнения реального времени. Они вызываются из прикладной программы.
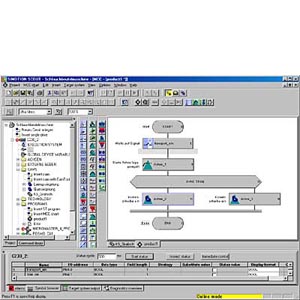
Блок-схема управления движением (MCC) может использоваться для формулирования процесса работы машины графическис помощью простых и логических элементов. Результатом являются одна или несколько блок-схем, отображающих хроноло-гическую последовательность отдельных операций.
Прежде всего, MCC поддерживает простое описание последовательности движений многоосевых машин посредством эф-фективных команд управления движением (например: реферирование оси, позиционирование оси, синхронизация и десин-хронизация оси по кулачку и многое другое).
Для управления машин доступны различные команды, например, при выполнении условия, могут быть прочитаны или запи-саны сигналы входов/выходов, сформулированы вычисления и запрограммированы управляющие структуры, такие как условие(IF), условный выбор (CASE) и циклы (WHILE, REPEAT UNTIL). Для описания различных случаев управления могут быть созданы несколько блок-схем MCC. Например, Вы можете создать одну программу MCC для приведения машины в определённое состояние после подачи питания, вторую программу MCC для нормального производственного процесса и третью программудля определения поведения машины в случае ошибки или сбоя.
Все команды доступны на панелях инструмента (отсортированы согласно функциям) и автоматически устанавливаются в блок-схему в указанную точку по щелчку левой кнопки мышки. При щелчке на различных элементах открываются индивидуальныедиалоги для дальнейшего параметрирования. Конечно, также возможно создавать индивидуальные примечания в документе последовательности действий.
Дальнейшая информация
Инженерное ПО SIMOTION SCOUT Дополниельная информация по инжиниринговой системе SCOUT и аппаратных компонентах, дополнительном программном обеспечении и заказным данным системы SIMOTION находится в каталоге PM10.