 Модули управления SINAMICS S120
Модули управления SINAMICS S120 Простые технологические задачи могут быть выполнены самими блоками управления SINAMICS S120. Блок управления CU320 разработан для управления нескольких приводов а блок управления CU310 разработан для управления одного привода. Привода подключаются к высокоуровневой системе управления через PROFIBUS. Ресурсоемкие задачи управления движения для приложений станок наилучшим образом поддерживаются спомощью высоко производительного блока управления SINAMICS S120 уже интегрированного в компоненты SINUMERIK (SINUMERIK 802D sl, SINUMERIK 840D sl NCU 710.2/NCU 720.2/NCU 730.2/NCU 730.2 PN and NX10/NX15).
Каждый из этих блоков управлений основан на объектно ориентированном стандартном математичеком обеспечении SINAMICS S120, который содержит все наиболее используемые режимы замкнутого управления и оно может быть расширено для наиболее сложных применений.
Следующие элементы является объектами управления привода:
- Управление для силового модуля: Управление питанием Infeed Control
- Управление для двигателей постоянного тока, синхронных, асинхронных с ресурсоемкими динамическими требованиями: Серво управление Servo Control
Эти варианты управления основаны на принципах замкнутого векторного управления.
Блок управления контролирует некоторое количество приводов. Он обеспечивает функции управления для приводов (модули двигателя, силовые модули) и системных компонентов. Загрузка блока управления сильно зависит от числа и динамических требований требуемых от индивидуального привода.
Если предполагается максимальное использование (Блок управления с performance enhancement 1 1) , следующее максимальное число осей и динамики приводов может быть достигнуто в режиме серво управления. На один модуль управления:
- До 6 управляемых серво осей с текущим циклом управления в 125 μсек, 1 активный силовой модуль с текущим циклом управления в 250 μсек и до 3 прямых измерительных систем или
- До 2 управляемых серво осей с текущим циклом управления в 62.5 μсек и до 3 прямых измерительных систем
1) Лицензирование для CU320 через опцию математического обеспечения или для SINUMERIK через опции оси.
Конфигурация
Модули управления SINAMICS S120 Руководство для выбора варианта замкнутого управления
Две таблицы ниже представляют характеристики Performance и характеристики замкнутого управления для помощи пользователю в выборе правильного типа замкнутого управления.
Режим Servo управления всегда предполагает опцию для использованния совместно с SINUMERIK. В проектах SINUMERIK, NCU 710.2/NCU 720.2/NCU 730.2/NCU 730.2 PN и NX10/NX15 или SINUMERIK 802D sl по отношению к возможностям привода эквивалентно Servo управлению для CU320.
Характеристики замкнутого управления: SINAMICS S120 CU320/CU310 блоки управления
| Критерий для достижения качества управления | Объяснения , определения |
| Время нарастания (Rise time) | Время нарастания это период который происходит между резким изменением задания и временем когда действительное значение достигает допуска заданного значения (отличие не более чем 2%). Время реагирования (dead time) это период который происходит между резким изменением задания и моментом изменения действительного значения. Время реагирования частично определяется процессом считывания , обработки и выводом цифрового задания. Там, где время реагирования занимает достаточно большую часть времени нарастания оно должно определяться отдельно. |
| Характеристика угловой частоты ‑3 dB | Предельное значение частоты – это значение динамического ответа замкнутой системы управления. Чистая синусоидная установка используется для расчета предельного значения частоты; ни одна из частей замкнутой системы управления не должна достигнуть этого предельного значения. Фактическое значение измеряется в условиях останова, также фиксируется коэффициент фактических значений амплитуд и установленных значений. «Предельная частота – 3дБ». Это частота, при которой абсолютное значение фактического значения впервые уменьшается на 3 дБ (до 71%). Замкнутая система управления может управлять частотами до этого значения, оставаясь при этом стабильной. |
| Колебания | Колебание – это нежелательная характеристика фактического значения, которая накладывается на среднее значение (полезный сигнал). Генерируемый крутящий момент – это очередной термин, используемый по отношению к крутящему моменту. Обычные генерируемые крутящие моменты возникают в связи с сетками слота для двигателя, ограниченного разрешения датчика или ограниченного разрешения системы управления напряжением блока питания IGBT. Колебание крутящего момента также отражается в колебании скорости, поскольку косвенно является пропорциональным значению инерции массы привода. |
Характеристики Performance: SINAMICS S120 CU310/CU320 блоки управления
| Возможности | Управление Серво | Векторное управление (не в комбинации с SINUMERIK) | Управление напряжением/частотой V/f (не в комбинации с SINUMERIK) | Примечания |
|---|---|---|---|---|
| Обычное применение |
|
|
| Возможно серийное производство с режимами управления напряжением/частотамиV/f . Поэтому режимы управления напряжением/частотами хранятся в векторном приводе только один раз. Параметры напряжения/частоты хранящиеся в сервоприводе предоставляются исключительно в целях проведения диагностики. |
| Динамический ответ | Очень высокий | Высокий | Низкий | Самый высокий динамический ответ у 1FT/1FK7 High Dynamic/ 1FN3/1FN6/1FW6 синхронных двигателей. |
| Режимы управления с датчиком | Управление позицией/Управление по скорости/ Управление по моменту | Управление позицией/Управление по скорости/ Управление по моменту | Нет | SINUMERIK и SIMOTION D с сервоуправлением является стандартным вариантом управления |
| Режимы управления без датчика | Управление по скорости | Управление по скорости/ управление по моменту | Режимы контроля напряжения/частоты | Сервоуправление только для асинхронных двигателей (индукционных двигателей). С помощью контроля напряжения/частоты скорость можно удерживать неизменной путем коррекции сдвига. |
| Асинхронный двигатель Синхронный двигатель Моментный двигатель Линейный двигатель | Да Да Да Да | Да Нет Нет Нет | Да Нет Нет Нет | Для двигателей SIEMOSYN рекомендуется осуществлять контроль напряжения/частоты (для текстильных станков) |
| Допустимый коэффициент для тока в двигателе и расчетного тока в модуле двигателя | 1:1 до 1:4 | 1:1.3 до 1:4 | 1:1 до 1:12 | Максимальное качество контроля до 1:4. Между 1:4 и 1:8 возрастают ограничения в отношении крутящего момента и точности вращения. Если < 1:8 рекомендуется контроль напряжения/частоты. |
| Максимальное количество параллельно соединенных двигателей в одном модуле двигателя | 4 | 1 | Теоретически неограниченно | В случае сервоуправления, подключать параллельно одинаковые двигатели можно только асинхронные (индукционные двигатели). В случае контроля напряжения/частот, двигатели не должны быть одинаковыми. |
| Количество приводов, которые может рассчитать один блок управления CU320 (контроллер цикла с заданными по умолчанию параметрами включая опцию performance expansion 1) | 1-линейный модуль (ALM, SLM) плюс 6 моторных осей (цикл обсчета тока 125 µсек) или 2 моторных оси (цикл обсчета тока 62.5 µсек) плюс 3 прямые измерительные системы | 1-линейный модуль (ALM, SLM) с 4 осями двигателя | 1-линейный модуль (ALM, SLM) с 10 осями двигателя | Количество осей двигателя может быть уменьшено, если приложение требует дополнительных функциональных модулей или более высокий динамический ответ.В случае с контролем напряжения/частоты, при векторном управлении в серийном производстве возможно наличие 4 осей двигателя, а в сервоуправлении возможно наличие 5 осей двигателя. |
| Установка разрешения скорости/частоты | 31 бит + знак | 31 бит + знак | 0.001 Гц |
|
| Установка разрешения крутящего момента | 31 бит + знак | 31 бит + знак | – |
|
| Заданная по умолчанию скорость тестирования /токовый контроллер /контроллер скорости /частоты пульсации (книжного формата) | 125 μсек/125 μсек/4 кГц | 2 моторных оси: 250 μсек/1,000 μсек/4 кГц | 4 моторных оси: 250 μсек/4 кГц | Скорость тестирования оказывает решающее значение на динамический ответ системы управления.Если выбрана опция «Изохронный PROFIBUS», циклы контроллера 125 мкс, 250 мкс, 375 мкс и 500 мкс адаптируются автоматически. |
| 4 моторных оси: 400 μсек/1,600 μсек/2.5 кГц | 6 моторных осей: 400 μсек/2.5 кГц | |||
| 10 моторных осей: 500 μсек/4 кГц | ||||
| Заданная по умолчанию скорость тестирования /токовый контроллер /контроллер скорости /частоты пульсации ( формат шасси размеры рамки FX и GX) | 250 μсек/250 μсек/2 кГц | 250 μсек/1,000 μсек/2 кГц | 4 моторных оси: 250 μсек/2 кГц | |
| 6 моторных осей: 400 μсек/1.25 кГц | ||||
| 10 моторных осей: 500 μсек/2 кГц | ||||
| Максимальная частота на выходе с токовым циклом контроллера/ частотой пульсации (книжный формат) | 650 Гц с 125 μсек/4 кГц1) | 300 Гц с 250 μs/4 кГц | 400 Гц с 250 μсек/4 кГц | Обратите внимание на предельное значение напряжения (2КВ) и использование модуля VPM с синхронными двигателями. |
| Максимальная частота на выходе с токовым циклом контроллера/ частотой пульсации(формат шасси размер FX и GX) | 300 Гц с 250 μсек/2 кГц | 160 Гц с 250 μсек/2 кГц | 200 Гц с 250 μсек/2 кГц | |
| Максимальное ослабление поля для асинхронных двигателей | 5 раз | 5 раз | 5 раз | С сервоуправлением в сочетании с датчиком положения и соответствующими специальными двигателями, возможно ослабление поля в 16 раз от порогового значения скорости. |
| Максимальное ослабление поля для синхронных двигателей | 2 раза4 раза с модулем защиты напряжения 2) | 2 раза | – | Эти значения относятся к синхронным двигателям 1FK/1FTОбратите внимание на предельное значение напряжения (фактор kE) при работе с двигателями других производителей (НЕ Siemens). |
1) Привода со стандартной выходной частотой до 650 Гц могут быть подсоединены без знаний детальных характеристик данных двигателя и могут работать (токовый контроллер 125 μсек/ частота импульсов 4 кГц).
Привода с выходной частотой > 650 Гц Dдо максимально 800 Гц могут быть использованы при следующих огранничениях:
- 600В регулируемое звено постоянного тока посредством активного модуля паитания
- Соответствующие двигатели фирмы Siemens с/без датчика двигателя
- Силовые модули в Smart режиме или Smart силовые модули с нерегулируемым 540В звеном постоянного тока требуют двигателей с подключенным датчиком
- Токовый контроллер 125 μсек/ частота импульсов 4 кГц;
Привода со выходной частотой > 800 Гц Dдо максимально 1600 Гц требуют специальных двигателей с датчиками, регулируемого активного силового модуля и токового контроллера 62.5 μсек/ частоты импульсов 8 кГц (рабочие характеристики двигательного модуля должны быть приняты во внимание).
Другие ограничения будут сообщены по требованию.
2) Зависит от EMF на максимальной скорости.
Основные характеристики управления по замкнутому контуру блока управления CU320
- Книжный формат, Частота импульсов 4 кГц, управление моментом по замкнутому контуру
| Сервоуправление | Векторное управление | Примечания | |||
|---|---|---|---|---|---|
| Синхронный двигатель | 1FK7 с резольвером | 1FT6 с абсолютным датчиком 2048 S/R | Векторное управление не является рабочим режимом для синхронных двигателей 1FK7/1FT6. |
| |
| Цикл управления | 125 μсек | 125 μсек | |||
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | 1.7 мсек(0.7 + 1) | 1.5 мсек(0.5 + 1) | В рабочем скоростном диапазоне 50 об/мин и выше для резольвера.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. | ||
| Характерная угловая частота -3 дБ | 650 Гц | 900 Гц | В данном случае динамический ответ определяется в первую очередь типом датчика положения. | ||
| Колебания момента | 3 % от M0 | 0.6 % от M0 | В рабочем скоростном диапазоне от 20 об/мин до рассчетной скорости.Колебание в < 1% возможно для абсолютного датчика ≤ 1 об/мин.Не возможно с резольвером. | ||
| Точность момента | ± 1.5 % от M0 | ± 1.5 % от M0 | Измеренное значение усредняется за 3 сек. С идентификацией двигателя и компенсацией трения.По моменту режим работы до ± M0.Рабочий скоростной диапазон 1:10 до рассчетной скоростиЗамечание: Внешние факторы такие как температура двигателя могут вызывать дополнительные отклонения (примерно) ± 2.5%.Приблизительно ± 1% меньшей точности при ослаблении поля. | ||
| Асинхронный двигатель | 1PH7 без датчика положения | 1PH7 с инкрементальным датчиком 1024 S/R | 1PH7 без датчика положения | 1PH7 с инкрементальным датчиком 1024 S/R |
|
| Цикл управления | 125 μсек | 125 μсек | 250 μсек | 250 μсек | |
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | – | 1.8 мсек(0.8 + 1) | 3 мсек(2 + 1) | 2.3 мсек(1.2 + 1) | В бездатчиковом режиме в рабочем скоростном диапазоне 1:10, с датчиком от 50 об/мин и выше до рассчетной скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. |
| Характерная угловая частота -3 дБ
| – | 600 Гц | 250 Гц | 400 Гц | В бездатчиковом режиме в рабочем скоростном диапазоне 1:10.Динамический ответ определяется типом датчика. |
| Колебания момента | – | 1.5 % от Mrated | 2 % от Mrated | 2 % от Mrated | В бездатчиковом режиме в рабочем скоростном диапазоне 1:20, с датчиком от 20 об/мин и выше до рассчетной скорости. |
| Точность момента | – | ± 3.5 % от Mrated | ± 2 % от Mrated | ± 1.5 % от Mrated | Измеренное значение усредняется за 3 сек. С идентификацией двигателя и компенсацией трения, введенной компенсацией температуры с помощью KTY84 и моделью веса.По моменту режим работы до ± M rated.Приблизительно ± 2.5 меньшей точности при ослаблении поля. Сервоуправление: Рабочий скоростной диапазон 1:10 до рассчетной скорости.Векторное управление: Рабочий скоростной диапазон 1:50 до рассчетной скорости |
- Книжный фомат, частота импульсов 4 кГц, управление скоростью по замкнутому контуру
| Сервоуправление | Векторное управление | Примечания | |||
|---|---|---|---|---|---|
| Синхронный двигатель | 1FK7 с резольвером | 1FT6 с абсолютным датчиком 2048 S/R | Векторное управление не является рабочим режимом для синхронных двигателей 1FK7/1FT6. |
| |
| Цикл управления | 125 μсек | 125 μсек | |||
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | 4.5 мсек(3.5 + 1) | 3.3 мсек(2.3 + 1) |
|
| В бездатчиковом режиме в рабочем скоростном диапазоне 1:10, с датчиком от 50 об/мин и выше до рассчетной скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. |
| Характерная угловая частота -3 дБ
| 140 Hz | 250 Hz |
|
| Динамический ответ определяется типом датчика. |
| Колебания скорости | См. примечание | См. примечание |
|
| В первую очередь определяется инерционным моментом всей массы, колебание крутящего момента и, особенно, механической конфигурацией.Таким образом, невозможно указать стандартное значение. |
| Точность скорости | ≤ 0.001 % от nrated | ≤ 0.001 % от nrated |
|
| В первую очередь, определяется разрешением отклонений системы управления и оценкой датчика в преобразователе. Внедрено на 32-битной основе для SINAMICS. |
| Асинхронный двигатель | 1PH7 без датчика | 1PH7 с инкрементальным датчиком 1024 S/R | 1PH7 без датчика | 1PH7 с инкрементальным датчиком 1024 S/R |
|
| Цикл управления | 125 μсек | 125 μсек | 250 μсек | 250 μсек | В бездатчиковом режиме в рабочем скоростном диапазоне 1:10, с датчиком от 50 об/мин и выше до рассчетной скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. |
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | 13 мсек(12 + 1) | 5 мсек(4 + 1) | 12 мсек(11 + 1) | 8 мсек(7 + 1) | Во время работы без датчика в рабочем скоростном диапазоне 1:10. Динамический ответ повышается за счет обратной связи с датчиком.Сервоуправление с датчиком немного более предпочтительнее чем векторное управление с датчииком, поскольку цикл контроллера скорости с сервоуправлением быстрее. |
| Характерная угловая частота -3 дБ
| 40 Гц | 120 Гц | 50 Гц | 80 Гц | Во время работы без датчика в рабочем скоростном диапазоне 1:10, с датчиком от 50 об/мин до рассчетой скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. |
| Колебания скорости | См. примечание | См. примечание | См. примечание | См. примечание | В первую очередь определяется инерционным моментом всей массы, колебание крутящего момента и, особенно, механической конфигурацией.Таким образом, невозможно указать стандартное значение. |
| Точность скорости | 0.1 × fslip | ≤ 0.001 % от nrated | 0.05 × fslip | ≤ 0.001 % от nrated | Без датчика: Прежде всего, определяется точностью расчетной модели для тока, обеспечивающего крутящий момент, и расчетным сдвигом асинхронного двигателя (см. таблицу «Стандартные значения сдвига»).Для скоростного рабочего диапазона 1: 50 (векторное управление) или 1:10 (сервоуправление) с оценкой активной температуры. |
- Формат шасси, частота импульсов 2 кГц, управление моментом по замкнутому контуру
| Серво управление | Векторное управление | Примечание | |||
|---|---|---|---|---|---|
| Синхронный двигатель | 1FT6 Большие Серво, 1PH8 без датчика | 1FT6 Большие Серво, 1PH8 с абсолютным датчиком 2048 S/R | Векторное управление не является рабочим режимом для синхронных двигателей 1FT6 Большие Серво. |
| |
| Цикл управления | 250 μсек | 250 μсек | |||
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | – | 2.2 мсек(1.2 + 1) |
| Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. | |
| Характерная угловая частота -3 дБ
| – | 400 Гц | Динамический ответ определяется типом датчика обратной связи. | ||
| Колебания момента | – | 1.3 % of M0 | Колебания в < 1 % возможны с абсолютным датчиком при ≤ 1 об/мин.Не возможно с резольвером. | ||
| Точность момента | – | ± 1.5 % of M0 | Измеренное значение усредняется за 3 сек. С идентификацией двигателя и компенсацией трения.По моменту режим работы до ± M 0.Рабочий скоростной диапазон 1:10 до рассчетной скоростиЗамечание: Внешние факторы такие как температура двигателя могут вызывать дополнительные отклонения (примерно) ± 2.5%.Приблизительно ± 1% меньшей точности при ослаблении поля. | ||
| Асинхронный двигатель | 1PH7/1PH8 без датчика | 1PH7/1PH8 с инкрементальным датчиком 1024 S/R | 1PH7/1PH8 без датчика | 1PH7/1PH8 с инкрементальным датчиком 1024 S/R |
|
| Цикл управления | 250 μсек | 250 μсек | 250 μсек | 250 μсек |
|
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | – | 2.6 мсек(1.6 + 1) | 3.5 мсек(2.5 + 1) | 2.6 мсек(1.6 + 1) | В бездатчиковом режиме в рабочем скоростном диапазоне 1:10, с датчиком от 50 об/мин и выше до рассчетной скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. |
| Характерная угловая частота -3 дБ
| – | 350 Гц | 200 Гц | 300 Гц | В бездатчиковом режиме в рабочем скоростном диапазоне 1:10.Динамический ответ определяется типом датчика. |
| Колебания момента | – | 2 % от Mrated | 2.5 % от Mrated | 2 % от Mrated | В бездатчиковом режиме в рабочем скоростном диапазоне 1:20, с датчиком от 20 об/мин и выше до рассчетной скорости. |
| Точность момента | – | ± 3.5 % от Mrated | ± 2 % от Mrated | ± 1.5 % от Mrated | Измеренное значение усредняется за 3 сек. С идентификацией двигателя и компенсацией трения, введенной компенсацией температуры с помощью KTY84 и моделью веса.По моменту режим работы до ± M rated.Приблизительно ± 2.5 меньшей точности при ослаблении поля. Сервоуправление: Рабочий скоростной диапазон 1:10 до рассчетной скорости.Векторное управление: Рабочий скоростной диапазон 1:50 до рассчетной скорости. |
- Формат шасси, частота импульсов 2 кГц, управление скоростью по замкнутому контуру
|
| Сервоуправление | Векторное управление | Примечание | ||
|---|---|---|---|---|---|
| Синхронный двигатель | 1FT6 Большие Серво, 1PH8 без датчика | 1FT6 Большие Серво, 1PH8 с абсолютным датчиком 2048 S/R | Векторное управление не является рабочим режимом для синхронных двигателей 1FT6 Большие Серво. |
| |
| Цикл управления | 250 μсек | 250 μсек |
| ||
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | – | 6 мсек(5 + 1) | | В бездатчиковом режиме в рабочем скоростном диапазоне 1:10, с датчиком от 50 об/мин и выше до рассчетной скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. | |
| Характерная угловая частота -3 дБ
| – | 100 Гц |
|
| Динамический ответ определяется типом датчика обратной связи. |
| Колебания скорости | – | См. примечание |
|
| В первую очередь определяется инерционным моментом всей массы, колебание крутящего момента и, особенно, механической конфигурацией.Таким образом, невозможно указать стандартное значение. |
| Точность скорости | – | ≤ 0.001 % от nrated |
|
| В первую очередь, определяется разрешением отклонений системы управления и оценкой кодировщика в преобразователе. Внедрено на 32-битной основе для SINAMICS. |
| Асинхронный двигатель | 1PH7/1PH8 без датчика | 1PH7/1PH8 с инкрементальным датчиком 1024 S/R | 1PH7/1PH8 без датчика | 1PH7/1PH8 с инкрементальным датчиком 1024 S/R |
|
| Цикл управления | 250 μсек | 250 μсек | 250 μсек | 250 μсек |
|
| Общее время нарастания (время нарастания + мертвое время)(rise time + dead time) | 21 мсек(20 + 1) | 8 мсек(7 + 1) | 14 мсек(13 + 1) | 12 мсек(10 + 1) | Во время работы без датчика в рабочем скоростном диапазоне 1:10, во время работы с датчиком от 50 об/мин и выше до значения расчетной скорости.Настройки по умолчанию для PROFIBUS DP – мертвое время 1 мс. |
| Характерная угловая частота -3 дБ
| 25 Гц | 80 Гц | 35 Гц | 60 Гц | Во время работы без датчика в рабочем скоростном диапазоне 1:10. Динамический ответ повышается за счет обратной связи с датчиком.Сервоуправление с датчиком немного более предпочтительнее чем векторное управление с датчиком, поскольку цикл контроллера скорости с сервоуправлением быстрее. |
| Колебания скорости | См. примечание | См. примечание | См. примечание | См. примечание | В первую очередь определяется инерционным моментом всей массы, колебание крутящего момента и, особенно, механической конфигурацией.Таким образом, невозможно указать стандартное значение. |
| Точность скорости | 0.1 × fslip | ≤ 0.001 % от nrated | 0.05 × fslip | ≤ 0.001 % от nrated | Без датчика: Прежде всего, определяется точностью расчетной модели для тока, обеспечивающего крутящий момент, и расчетным сдвигом асинхронного двигателя (см. таблицу «Стандартные значения сдвига»).Для скоростного рабочего диапазона 1: 50 (векторное управление) или 1:10 (сервоуправление) с оценкой активной температуры. |
Типичные значения колебаний для стандартного асинхронного двигателя
| Мощность двигателя | Значения колебаний | Примечание |
|---|---|---|
| < 1 кВт | 6 % от nratedто есть для двигателя при 1500 об/мин: 90 об/мин | Значения колебаний для асинхронного двигателя 1PH7 аналогичны стандартным двигателям |
| < 10 кВт | 3 % от nratedто есть для двигателя при 1500 об/мин: 45 об/мин | |
| < 30 кВт | 2 % от nratedто есть для двигателя при 1500 об/мин: 30 об/мин | |
| < 100 кВт | 1 % от nratedто есть для двигателя при 1500 об/мин: 15 об/мин | |
| > 500 кВт | 0.5 % от nratedто есть для двигателя при 1500 об/мин: 7.5 об/мин |
Расчет производительности: Масштабирование
Масштабирование производительности блока управления CU320 может осуществляться с помощью микропрограмм. Использование Расширения производительности 1 увеличивает расчетную мощность на 100%. (при включении как стандарт модулей интегрированных в линейку SINUMERIK solution line). Для мощности 55% и выше требуется Расширение производительности 1.
Требования производительности зависят от ряда функций и динамического ответа, требуемого приложением и, помимо прочего, от количества приводов, которые должны функционировать на Блоке управления.
Представленная ниже таблица содержит краткую информацию о производительности блока управления CU320 в качестве функции текущего цикла контроллера (динамического ответа) и ряда осей с набором основных функций (заводские установки).
Если адаптер блока управления CUA31 подключен к CU320, в каждом случае число осей сокращается на одну.
Примечание: Инструмент конфигурации SIZER используется для точного расчета требования производительности.
Обзор характеристик производительности блока управления CU320
|
| Динамический рассчет (Цикл обсчета токового контроллера) | Количество осей без Расширения производительности 1 | Количество осей с Расширением производительности 1 | Примечания |
|---|---|---|---|---|
| Сервоуправление | 125 μсек | 3 | 6 | Плюс один модуль питания (SLM, ALM).Количество осей применяется только к базовой функциональности.Без расширенного канала установок. Обратите внимание на рабочие характеристики блока питания, если это требуется. |
| 250 μсек | 3 | 6 | ||
| Векторное управление | 250 μсек | 1 | 2 | Плюс один модуль питания (SLM, ALM).Количество осей применяется только к базовой функциональности.Расширенный канал установок включен в качестве стандартного.Обратите внимание на рабочие характеристики блока питания, если это требуется. |
| 400 μсек | 2 | 4 | ||
| V/f управление | 250 μсек | 2 | 4 | Плюс один модуль питания (SLM, ALM).Количество осей применяется только к базовой функциональности.Расширенный канал установок включен в качестве стандартного |
| 400 μсек | 3 | 6 | ||
| 500 μсек | 4 | 8 | ||
| Смешанные операции |
|
|
|
|
| Сервоуправление плюс V/f управление | 125 μсек+ 250 μсек/400 μсек | – | 5 | Максимально 2 V/f оси с контроллером текущего цикла 250 μs, в других случаях делится согласно требованиям. |
| Векторное управление плюс V/f управление | 250 μсек/400 μсек | 1/2 | 2/4 | Смешанная эксплуатация с векторным управлением и управлением напряжением/частотой не отличается от эксплуатации с чисто векторным управлением. |
Переменные, влияющие на минимальную необходимую частоту пульсации блока питания
Основные требования, такие как максимальная скорость или необходимый динамический ответ системы управления, непосредственно влияют на определение значения минимальной частоты пульсации блока питания. Если значение минимальной частоты пульсации превышает расчетную частоту, должно быть применено дефорсирование (см. раздел «Описание блока питания»).
В представленной ниже таблице отражены основные моменты.
| Переменные | Минимальная частота пульсации | Примечания | |
|---|---|---|---|
| Сервоуправление, векторное управление (требуемая макс. частота/скорость на выходе) | 100 Гц соответствует: 3000 об/мин для Zp = 21500 об/мин для Zp p = 4428 об/мин для Zp = 14352 об/мин для Zp = 17 | 1.25 кГц | Z p количество пар полюсов двигателя. В асинхронных двигателях 1PH7(индукционных двигателях) их 2.В синхронных двигателях 1FK7/1FT6 от 2 до 4 пар полюсов. Моментные двигатели с высотой оси < 200 имеют 14 пар полюсов, а двигатели с высотой оси ≥ 200 имеют 17 пар полюсов . |
| 160 Гц соответствует: 4800 об/мин для Zp = 22400 об/мин для Zp = 4685 об/мин дляZp = 14565 об/мин для Zp = 17 | 2 кГц | ||
| 200 Гц соответствует: 6000 об/мин для Zp = 23000 об/мин для Zp = 4856 об/мин для Zp = 14704 об/мин для Zp = 17 | 2.5 кГц | ||
| 300 Гц соответствует: 9000 об/мин для Zp = 24500 об/мин для Zp = 41284 об/мин для Zp = 141056 об/мин для Zp = 17 | 4 кГц | ||
| 400 Гц соответствует: 12000 об/мин для Zp = 26000 об/мин для Zp = 4 | 4 кГц | Внимание: Только для сервоуправления с двигателями 1FT6/1FK7.Для развития более высоких скоростей обратите внимание на требования к ослаблению поля и подходящую систему датчика. | |
| Управление напряжением/частотой (требуемая макс. частота/скорость на выходе) | 100 Гц соответствует: 6000 об/мин для Zp = 13000 об/мин для Zp = 2 | 1.25 кГц | Управление напряжением/частотой разработано только для асинхронных двигателей (индукционных двигателей) и двигателей SIEMOSYN. Z p количество пар полюсов двигателя. В стандартных асинхронных двигателях (индукционных двигателях) 1LA/1LG количество пар полюсов составляет от 1 до 4.В двигателях SIEMOSYN от 1 до 2 пар полюсов, а в двигателях с большей высотой оси – 3 пары.
|
| 160 Гц соответствует: 9600 об/мин для Zp = 14800 об/мин для Zp = 2 | 2 кГц | ||
| 200 Гц соответствует: 12000 об/мин для Zp = 16000 об/мин для Zp = 2 | 2.5 кГц | ||
| 300 Hz соответствует: 18000 об/мин для Zp = 19000 об/мин для Zp = 2 | 4 кГц | ||
| 400 Hz соответствует: 24000 об/мин для Zp = 112000 об/мин для Zp = 2 | 4 кГц | ||
| Требования динамического ответа (текущго цикла контроллера) | 125 μсек250 μсек 400 μсек500 μсек | 4 кГц 2 кГц 2.5 кГц 1 кГц | Для сервоуправления минимальная частота пульсации должна составлять 2 кГц. |
Ключевые топологии: Соединение компонентов с DRIVE-CLiQ
Компоненты взаимодействуют друг с другом через стандартный интерфейс DRIVE CLiQ.
Этот интерфейс соединяет блок управления с компонентами питания, датчиками и прочими компонентами системы, например, модулями терминала. Через DRIVE CLiQ передаются установочные параметры, фактические значения, команды управления, сообщения о статусе и данных на паспортной табличке для компонентов.
Основные правила работы с интерфейсом DRIVE CLiQ
Соединение компонентов посредством интерфейса DRIVE CLiQ подчинено следующим правилам:
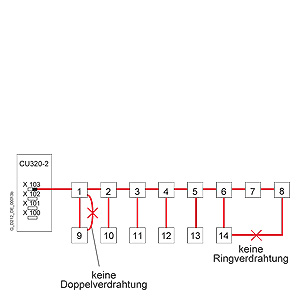
- К разъему DRIVE CLiQ на блоке управления CU320Control Unit/integrated CU solution максимум можно подсоединить 14 узлов
- На одну линию можно подсоединить до 8 узлов. Линия всегда просматривается с перспективы Блока управления.
- Максимальное количество модулей двигателя (осей) на одной линии – 6 (Двойной моторный модуль считается как 2 оси)
- Кольцевая проводка не допускается
- Двойная проводка компонентов не допускается
- Датчик двигателя подсоединяется к соответствующему модулю двигателя.
- Циклы обсчета всех компонентов подсоединенных к линии DRIVE-CLiQ должны делиться один на другой нацело. Комбинация осей с циклом обсчета токового контура в 125 µсек с Активным модулем питания может быть использована с кабелем DRIVE-CLiQ.
Соединение DRIVE-CLiQ компонентов
Примеры конфигурации интерфейса DRIVE-CLiQ
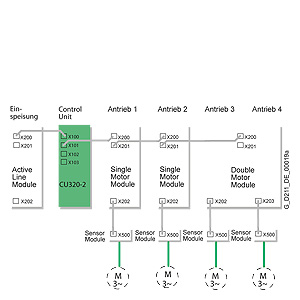
Для модулей, подсоединенных через интерфейс DRIVE CLiQ, можно настроить только один текущий цикл контроллера. Поэтому через DRIVE-CLiQ подсоединяются сразу несколько модулей с одинаковым циклом контроллера. Для упрощения процедуры настройки рекомендуется подключать модуль питания и модули двигателя через отдельные соединения с интерфейсом DRIVE CLiQ.
Компоненты питания поставляются с необходимым кабелем DRIVE CLiQ для подключения к расположенному рядом узлу DRIVE CLiQ в группе осей (топология линии). Для подсоединения датчиков двигателя, датчиков прямого измерения, модулей терминала и т.д. имеются кабели DRIVE CLiQ различной длины, до 100 м.
Длина кабелей DRIVE CLiQ внутри шкафа управления не должна превышать 70 м, например, соединение между блоком управления CU320 и первым модулем двигателя или между модулями двигателя. Максимальная допустимая длина кабелей DRIVE CLiQ MOTION-CONNECT, протянутых до внешних компонентов, составляет 100 м.
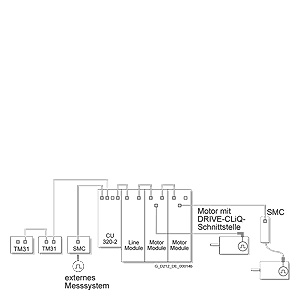
Пример топологии линии для стандартных решений с сервоуправлением
Пример древовидной топологии для высокопроизводительных решений, например, высокодинамичных осей в группе управления прямого движения, выборочный доступ к отдельным осям/группам осей в целях технического обслуживания и т.д.
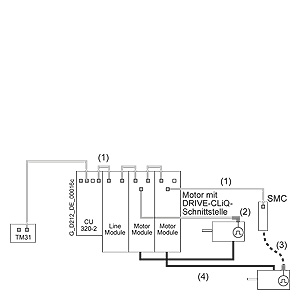
Пример предпочтительной топологии DRIVE‑CLiQ соединений для компонентов книжного формата
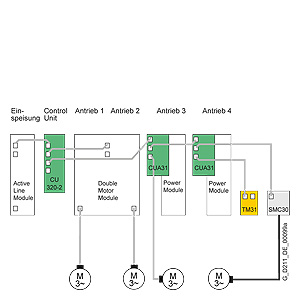
Пример топологии: Если модуль питания подсоединен через CUA31, он также может работать на CU320