Системные компоненты - Конфигурирование
 КонфигурацияРеакторы двигателяВысокоскоростное включение силовых транзисторов вызывает появление ёмкостных токов зарядки/разрядки в кабеле двигателя и самом двигателе, а также повышение напряжения в обмотках двигателя. Эти токи могут быть уменьшены с установкой реактора двигателя. 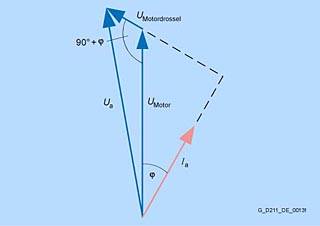 Реакторы двигателя допускаются к использованию только в векторном и векторно-частотном режимах. Реакторы двигателя совместимы со всеми типами модуляции (пространственно-векторная модуляция, контурная модуляция).
Синусоидальные фильтрыСинусоидальные фильтры – это низкочастотные LC-фильтры, которые позволяют эффективно пропускать только основные гармоники выходного напряжения Силового Модуля или Модуля Двигателя с прямоугольным сигналом и широтно-импульсной модуляцией. Резонансная частота синусоидального фильтра должна быть значительно ниже, чем импульсная частота Силового Модуля или Модуля Двигателя, и измеряться со значительным запасом по отношению к максимально допустимой выходной частоте. Таким образом, синусоидальные фильтры определяют выбор импульсной частоты и накладывают ограничение на максимально допустимую выходную частоту. Этот тип фильтра совместим только с пространственно-векторной модуляцией. Таким образом, выходное напряжение Силового Модуля или Модуля Двигателя ограничено выходным напряжением (среднеквадратическое значение) в приблизительно 0,67 x напряжение в цепи DC. При падении напряжения, проходящего через синусоидальный фильтр, максимально возможное выходное напряжение (среднеквадратическое значение) будет составлять приблизительно 0,63 x напряжение в цепи DC. Синусоидальный фильтр регистрируется на Блоке Управления при помощи параметра настройки, где храняться все значения по умолчанию, относящиеся к фильтру, такие как допустимые типы модуляции, максимальная выходная частота и т.д..
Сенсорные МодулиПри предварительном формировании сигнала для различных преобразователей (инкрементальный преобразователь sin/cos 1 Vpp, абсолютный преобразователь, синусно-косинусный преобразователь) сигналы преобразуются к сигналам DRIVE-CLIQ при помощи сенсорных модулей. В зависимости от системы измерения, будут использоваться Сенсорные Модули SMC10, SMC20 или SMC30. Сенсорные Модули монтируются на рейках DIN. Они также используются для формирования сигнала внешних (машинных) преобразователей.
Модули расширенияДаже стандартная версия Блока Управления CU320 включает интерфейсы и терминаля для связи. SINAMICS S120 предлагает следующие модули расширения:
Модули Торможения и тормозные резисторыБлоки торможения состоят из Модуля Торможения и тормозного резистора, которые должны подключаться внешним образом.
Модули торможения и тормозные резисторы в книжном формате Для работы Модулей Торможения формата книги требуется минимальное ёмкостное сопротивление в цепи DC. Это ёмкостное сопротивление определяется используемым тормозным резистором. Тормозной резистор 0,3 кВт/25 кВт → ёмкость цепи DC 220 мкФ Тормозной резистор 1,5 кВт/100 кВт → ёмкость цепи DC 330 мкФ Ёмкостное сопротивление Модуля Торможения формата книги величиной в 110 мкФ включено в общее значение ёмкости. Если ёмкостное сопротивление цепи DC недостаточно для использования одного или нескольких Модулей Торможения, для увеличения эффективной ёмкости цепи DC для группы приводов может быть добавлен Модуль Ёмкости. Когда Модули Торможения формата книги подключены параллельно, минимальное ёмкостное сопротивление, указанное выше, должно быть обеспечено для каждого Модуля Торможения. Примечание: Только модули формата книги, напрямую подключённые друг к другу через основную шину цепи DC, могут быть включены в общую ёмкость. Если ёмкостное сопротивление цепи DC недостаточно для работы нескольких Модулей Торможения, для увеличения ёмкости цепи DC могут быть использованы Модули Ёмкости. Должна учитываться максимально допустимая ёмкость цепи DC группы приводов на Модуле Линии. Tмаксимальные ёмкостные сопротивления, которые должны учитываться для ограничения тока предварительной зарядки Модулей Линии, приведены в технической документации по модулям Линии. 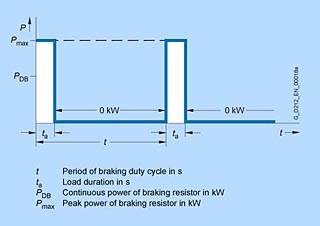 Рабочий цикл тормозных резисторов Модули Торможения и тормозные резисторы для формата шасси Модули Торможения с мощностью торможения в 25 кВт (для типа FX) и 50 кВт (для типов GX, HX и JX) доступны с соответствующими тормозными резисторами для блоков формата шасси. Для получения более высокой тормозной мощности блоки торможения могут быть подключены параллельно. В данном случае блоки могут устанавливаться на конце Модуля Линии или на конце Модуля Двигателя. Когда Модуль Торможения устанавливается на Базовый Модуль Линии размера GB, поставляемые кабели для подключения к цепи DC слишком малы. В данном случае для подключения Модуля Торможения должен быть заказан жгут кабелей 6SL3366 2NG00 0AA0.
Модуль Торможения включает электронный интерфейс (X21) с функцией контроля. Гнездо для тормозного резистора содержит контролирующий термоконтакт. Обе эти контролирующие функции могут быть включены в цепи системы приводов, предназначенные для предупреждения или отключения. Расчёт требований к Модулям Торможения и тормозным резисторам • Для периодичных рабочих циклов с длительностью цикла ≤ 90 с, должно быть определено среднее значение тормозной мощности внутри данного рабочего цикла. В качестве временной развёртки должна использоваться длительность соответствующего цикла. При выборе блоков торможения (Модуля Торможения и тормозного резистора) кроме средней тормозной мощности должна учитываться и пиковая тормозная мощность. Исходные данные
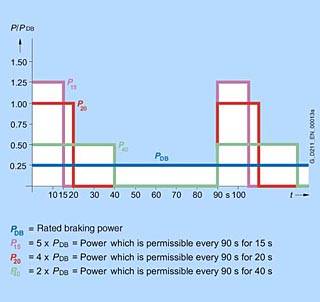 Диаграмма нагрузок Тормозные резисторы для Силовых Модулей формата книгиТормозные резисторы для размеров FSA и FSB разработаны как подструктурные компоненты. Тормозные резисторы для размеров от FSC до FSF должны монтироваться вне шкафа управления из-за их высокой теплоотдачи. Тормозная мощность Pmech на валу двигателя больше, чем потеря мощности тормозным резистором, т.к. в данном случае необходимо только преобразовать энергию в цепи DC в тепло. Мощность цепи DC Pd Силового Модуля в режиме генератора рассчитывается из мощности на валу двигателя Pmech, потери мощности двигателем Pv Motor и в Силовом Модуле Pv Power Module следующим образом: Pd = Pmech – Pv Motor – Pv Power Module = Pbraking resistor Модуль емкости формата книги Модуль емкости работает как краткосрочный буфер энергии, например, для борьбы с короткими перебоями в подаче энергии или для сохранения энергии торможения. Буферная энергия W может быть рассчитана следующим образом:
Пример: Ud1 = 600 В; Ud2 = 430 В Модуль Управления Питанием формата книги Модуль Управления Питанием осуществляет подачу питания 24 В DC от сети или цепи DC для поддержания работы компонентов системы в случае неисправности в сети. Это позволяет, например, произвести необходимые действия в случае отсутствия подачи питания. Внешнее питание компонентов от 24 В DC Блоки питания (Модули Линии и Модули Двигателя) и другие компоненты системы должны быть обеспечены 24 В напряжением DC через внешний источник подачи электропитания. 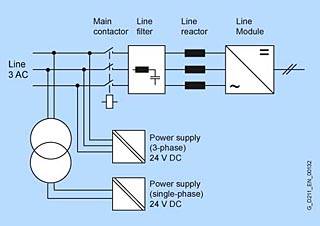 Подключение внешнего источника электропитания Потребность в токе IDC ext рассчитывается по следующей формуле: Σ [Блок Управления + встроенные функции (например, TB30 + CBC10) + компоненты системы + Модуль Линии + Σ (Модули Двигателя + SMCxx + управление торможением двигателя)]Также должны учитываться и другие компоненты системы (например, линейный выключатель). Предельные значения для конфигурации: • Максимальная пропускная способность по току встроенной шины 24 В DC (только в формате книги) составляет 20 А. Ёмкостные конденсаторы большинства компонентов должны быть заполнены, когда подача питания 24 В DC включается в первый раз. Для зарядки этих конденсаторов от источника питания сначала должен поступить пиковый ток, который может составлять основу требований по току IDC ext, рассчитанных выше. Этот пиковый ток должен учитываться при выборе защитных элементов, например, миниатюрных автоматических выключателей для подключения к источнику питания 24 В DC (типы с пропускными значениями I2 t в соответствии с характеристикой D). Пиковый ток наблюдается в течение промежутка времени te, меньшем, чем 100 мс. Предельное значение определяется по импедансу источника 24 В DC и его максимальному току, ограниченному электроникой
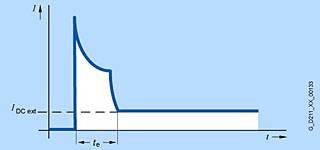 Типичная форма колебания тока при подключении к источнику 24 В DC | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||