 Универсальные механические прессы
Универсальные механические прессы Требования к машине
Механические универсальные прессы отличаются высокой гибкостью, так как они подходят как к для резки, так и для деформированию. Путем комбинирования прессов с инструментами резки, сборки, переукладки и т.п. могут производиться детали от самых маленьких до средней величины. Для этих машин концепция главного привода одинакова. Ползун пресса при помощи инструмента приводится от механического устройства (эксцентрик, коленчатый рычаг) с электрическим приводом и маховиком. Движением ползуна управляет тормоз и муфта.
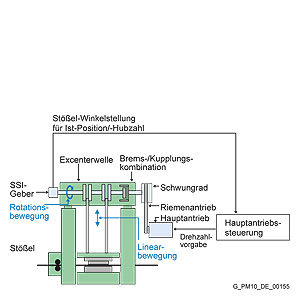
Принцип механического универсального пресса
Для простых прессов материал может подаваться руками, для автоматизированных прессов (штамповочных и прессовых автоматов) материал подается непрерывно с рулона в виде ленты посредством роликовой подачи или захватов. Управлениересса решает различные задачи, такие как обслуживание и наблюдение, общее управление машиной, управление режимами работы вспомогательных приводов и главным приводом, защита инструмента, управление электронными кулачками, контроль процесса и задачи позиционирования.
В прессах штамповочных автоматах высокие требования предъявляются к времени обработки критичных функций (кулачковые переключатели, контроль процесса, и т.д.). Универсальные прессы с частотами ходов до 100, максимум 200 ходов в минуту являются в большинстве случаев простыми прессами с малой степенью автоматизации. При частотах ходов от 200 до 500 ходов в минуту, у штамповочных автоматов со скоростью до 2000 ходов в минуту сложность системы управления и требования ко времени реакции и степени автоматизации значительно возрастают.
Особенности
Универсальные механические прессы Задачей автоматизации является комплексное управление последовательностью действий (логика), функциями движения и технологическими функциями. С SIMOTION можно удачно решить весь комплекс задачи. Программирование алгоритма можно реализовать в привычном KOP или FUP.
Специфические для технологии программы программируются преимущественно на текстовых языках (похожие на структурированный текст) а задачи управления движением - инструментом с графическим интерфейсом Motion Control Chart (MCC).
Таким образом различные задачи, такие как:
- Управление режимами работы
- Управление главным приводом, с установкой частоты ходов и запуском по кривым плавного разгона
- Позиционирование главного привода для изменения вертикального хода или замены инструмента
- Кулачковое устройство управления с расчетом угла динамического торможения для остановки в верхней мертвой точке
- Контроль процесса для защиты инструмента и контроль усилия пресса
программируются в одной системе инжиниринга и реализуются на наиболее подходящей для конкретного пресса аппаратной платформе.
При этом
- Сокращается разнообразие интерфейсов
- Оптимизируются затраты на инжиниринг и ввод в эксплуатацию
- Облегчается стандартизация
Дизайн
Универсальные механические прессы Решение автоматизации
В представленной концепции автоматизации как аппаратная платформа выбрана SIMOTION D с системой привода SINAMICS S120. Как управление машины, так и технологические функции программируются на SIMOTION D, управляются и контролируются через децентрализованную периферию ET200. Через встроенные в привод быстрые модули периферийных устройства TM15 или TM17 управляются кулачки и соответственно принимаются сигналы быстрых датчиков для контроля процесса. Двигателем управляет модуль двигателя SINAMICS S120.
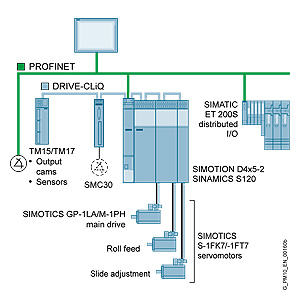
Автоматизация на примере с SIMOTION D
Дальнейшая информация
Универсальные механические прессы Техническая поддержка A&D
Тел.: +49 (180) 50 50 222
Internet:www.siemens.com/metalforming